Принцип работы акустических детекторов: генерация звуковых импульсов от
нейтрино.
Принцип работы акустических детекторов: типы детектирующих устройств.
Существующие акустические детекторы нейтрино.
Некоторые результаты.
Перспективы и проблемы.
Список литературы
1. Вступление
Регистрация нейтрино – трудоемкий процесс, связанный со многими техническими
сложностями, огромными объемами детекторов и низкой скоростью накопления данных.
Нейтрино является незаряженным лептоном с очень маленькой массой (если она
вообще есть), и участвует практически только в слабых взаимодействиях. Поэтому
сечение взаимодействия нейтрино с веществом мало, до 10-40см2,
хотя и увеличивается с увеличением энергии и зависит от плотности среды.
Сейчас наиболее развитыми методами регистрации нейтрино являются черенковский (в
оптическом, ультрафиолетовом и радио диапазоне), использующий эффект
Вавилова-Черенкова от заряженных частиц – результата взаимодействия нейтрино,
сцинтилляционный и радиохимический, регистрирующий ядерную реакцию бета-распада.
Однако эти методы применимы не для всех энергий и имеют свои ограничения. На
данный момент существуют альтернативные способы, которые, возможно, могли бы
расширить диапазон и повысить эффективность регистрации нейтрино.
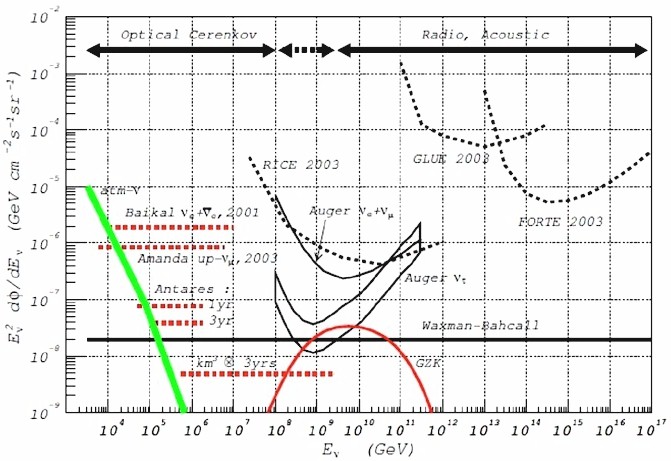
На рисунке 2 представлены области энергий, в которых сейчас работают некоторые
нейтринные телескопы, и видно, что акустический метод может быть особенно важным
и полезным для детектирования высокоэнергетичных нейтрино и исследования эффекта
ГЗК-обрезания, а также происхождения нейтрино с такой энергией и проверки
космологических теорий.
Рис.1. Диапазоны работы современных нейтринных детекторов.
2. Механизм генерации звуковых импульсов от нейтрино
Термоакустический механизм
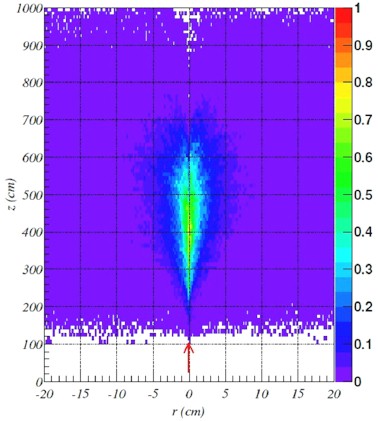
Рис.2. Распределение температуры в воде при взаимодействии с электромагнитным
каскадом, компьютерное моделирование. [3]
Акустическое детектирование широких атмосферных ливней с использованием
гидрофонов, погруженных в большие объемы воды, хотя и было предложено много лет
назад советским ученым
Аскарьяном [1], до сих пор еще не реализовано как
эффективный принцип детектирования космических лучей. Тем не менее, эта техника
была проверена на меньшем масштабе с использованием пучков заряженных частиц от
ускорителя.
Существует несколько предложенных механизмов возникновения в воде (или другой
плотной среде) акустического импульса при взаимодействии с ней
высокоэнергетичной заряженной частицы. Адронные и электромагнитные каскады,
образованные в результате прохождении нейтрино из космических лучей (1010 ГэВ, или 1 Дж) через среду, могут выделить в нее достаточно тепловой энергии для
создания звуковых сигналов. Доминирующим и рассчитываемым связующим механизмом
является почти мгновенное расширение объема материала, в котором выделяется
тепловая энергия, хотя предлагаются и другие способы возникновения импульса,
такие как образование микро-пузырей. [3]
Рис.3. Геометрия распространения сигнала [3].
Так как скорость звука в воде намного меньше, чем скорость распространения
ливня, энерговыделение по длине каскада можно считать квази-мгновенным, что
приводит к акустически линейной модели источника. На больших расстояниях от него
в плоскости, перпендикулярной оси ливня, акустическое возмущение является
когерентным, что приводит к большой амплитуде импульсов давления. Величина
импульса давления очень быстро падает при отдалении от этой плоскости.
Важным преимуществом использования акустических датчиков в воде является то, что
длина затухания звукового сигнала от каскада, вызванного космическими лучами,
составляет порядка километра для частоты 20 – 30 кГц в морской воде, а в пресной
– в десятки раз больше [2]. Это позволяет использовать огромные объемы воды с
небольшими затратами, так как можно ставить детектирующие устройства дальше друг
от друга, чем в радио или оптических черенковских детекторах.
Другой полезной особенностью акустического сигнала от каскада является то, что
его энергия сконцентрирована в небольшом диапазоне углов перпендикулярно к
направлению распространения ливня. Массив гидрофонов сможет производить
регистрацию со всех сторон и точно реконструировать расположение ливня и его
направления. Оптимальная конструкция таких массивов будет разрабатываться в
рамках конкретных проектов.
Рис. 4. Зависимость амплитуды акустического сигнала от энергии импульса (энерговыделения
в сбросе) для протонных (1, 2), электронных (3) и лазерных (4) пучков в воде
Теоретически и экспериментально установлено, что амплитуда звуковых волн
(звукового давления), излучаемых квази-точечным источником, возрастает прямо
пропорционально мощности излучения в каскаде. (Рисунок 4)
Акустический сигнал точечного излучателя (микроимпульса) можно описать как
решение дифференциального уравнения [4]
где р – давление в среде, сs– скорость звука, ε – энергия ионизирующей частицы, β – коэффициент
температурного расширения, ср– изобарическая теплоемкость.
Для одиночного источника решение записывается в таком виде:
Рис. 5 Форма импульса давления в дальней зоне (1 км) от каскада с энергией
1.2×1011 ГэВ.
и имеет биполярную форму. Для некоторого объема вещества, нагреваемого каскадом,
результирующий импульс будет суммой одиночных: волновой фронт и форма сигнала
зависит от плотности распределения энергии в каскаде. В общем виде решение
дается формулой:
Импульс распространяется под прямым углом к оси ливня со скоростью звука в воде
и может быть зарегистрирован современными гидрофонами. Из сигнала на одном
гидрофоне невозможно извлечь информацию о направлении каскада – для этого нужно
иметь совпадение сигналов хотя на нескольких гидрофонах, тогда можно будет
восстановить направление каскада, а также снизить уровень сигналов от шума и
фоновых источников.
Влияние свойств среды
Скорость звука меняется в зависимости от глубины, температуры, солености и
примесей в воде и возрастает линейно с увеличением давления. Поэтому важной
частью эксперимента является изучение параметров среды, в которой будет
проводиться регистрация акустических импульсов.
По предварительным оценкам [4] амплитуда давления связана с энергией нейтрино
зависимостью
pmax
≈ Eν × γ/4,
где
коэффициент γ определяется свойствами среды:
Поглощение (затухание сигнала) вызвано главным образом химическим строением и
составляет в воде порядка 10 км на частоте 10 кГц.
Коэффициент пропорциональности между изменением скорости звука и изменение
глубины равен примерно Δcs/Δz = 1.65 см/с/м.
Это приводит к деформации формы волнового фронта, искажению плоскости "диска" и
иногда отражению от более плотных слоев. На поверхности воды скорость звука
составляет 1545 м/с.
Фоновый шум в воде имеет различное происхождение: это диффузный равномерный шум
от ветра, сейсмический, от дождя, тепловой шум, а также отдельные акустические
импульсы, создаваемые китами, подводными лодками, кораблями и прочими
искусственными объектами. Деятельность человека увеличивает уровень шума на 1 дБ
в год.
Акустические свойства льда отличаются от воды, и их тоже предстоит изучить.
3. Типы детектирующих устройств
Устройства для регистрации акустических импульсов (волн плотности и давления) в
воде называются гидрофонами. Их задача – преобразовать энергию волны в цифровой
сигнал и в конечном итоге – в информацию об этой волне. Основными
характеристиками, которые интересуют нас при регистрации нейтрино, являются
амплитуда акустического импульса и плоскость распространения волны. Из этих
данных можно найти энергию, оставленную в воде каскадом, направление его прихода
и, соответственно, энергию и направление первоначального нейтрино.
Наиболее разработанной и применяемой сейчас является технология регистрации
импульсов давления пьезоэлементами, которые при включении их в электрическую
цепь дают импульс тока в этой цепи из-за деформации и поляризации кристалла (или
некристаллического пьезоэлемента). Импульс тока проверяется триггерами и
записывается в виде цифрового сигнала.
Гидрофоны на этом принципе используются в военных целях для локации и навигации.
Они недорогие в изготовлении, обладают хорошей чувствительностью, но их
недостатком является наличие внутреннего шума от электроники в той цепи, в
которую включен пьезоэлемент, а также то, что такую электронику нужно
монтировать в каждом гидрофоне, что не очень удобно при работе на большой
глубине или во льду.
Вторым типом регистрирующих устройств являются оптоволоконные гидрофоны. Это
новая технология, которая пока еще тестируется в лабораториях и не применялась в
реальных акустических нейтринных детекторах. Принцип работы заключается в том,
что на упругий деформируемый цилиндр намотано оптоволокно, а этот цилиндр в свою
очередь надет на жесткий каркас. Оптоволоконная катушка гидрофона соединена
таким же светопроводом с импульсным лазером, который запускает по волокну
импульсы с периодом, за который каждый отдельный импульс проходит туда и обратно
всю длину гидрофона. На входе гидрофона и другом его конце стоят зеркала Брэгга,
от которых частично отражаются лазерные импульсы. Отраженные импульсы
регистрируются фотоприемником и в недеформированном состоянии отраженный от
дальнего конца гидрофона импульс должен прийти на приемник в фазе со следующим,
отраженным от зеркала на входе.
Волна давления деформирует упругий цилиндр, в результате чего меняется световой
путь в оптоволокне и возникает интерференция между импульсами. Регистрируя ее,
можно получить данные о степени деформации оптоволокна и амплитуде акустической
волны. Для определения направления и плоскости, в которой распространяется
акустический сигнал, необходимо иметь массив гидрофонов.
Основным преимуществом устройств такого типа является отсутствие дополнительной
электроники возле каждого гидрофона. На светопровод, в который запускаются
лазерные импульсы, можно ставить несколько гидрофонов, что значительно облегчит
создание массивов и уменьшит стоимость детектора. Также отсутствуют связанные с
электроникой шумы.
4. Существующие эксперименты, использующие акустический метод регистрации
нейтрино
Так как акустический метод находится на стадии разработки и кажется
перспективным, то некоторые нейтринные телескопы включают акустическую технику
вместе с другим, например, черенковким, детектором. Ниже дадим краткое описание
таких экспериментов.
1. Brookhaven National Laboratory
и
Harvard University (1978).
Это
был первый эксперимент по проверке выдвинутого в 1957 году
термоакустического метода генерации сигнала от заряженных частиц. В
эксперименте использовались пучки протонов диаметром 4,5 см с энергией до
200 МэВ. Механизм был подтвержден, и затем в 1976 году также Аскарьяном был
предложен способ применить этот же метод к регистрации нейтрино [2]. А
именно, были рассчитаны параметры установки в океане для нейтрино с энергией
больше 1016
эВ,
содержащей 105 гидрофонов в виде пространственной решетки с шагом около 100 м. Она будет
охватывать объем 10км×10км×1км и в соответствии с теорией регистрировать
около 1000 нейтринных событий в год.
При регистрации одного события в установке будет срабатывать в среднем 50
гидрофонов. Пространственно-временные корреляции в срабатывании гидрофонов,
связанные с характерным видом акустического сигнала, должны обеспечить выделение
его на уровне шумов. Кроме того, оставшиеся гидрофоны могут служить как детектор
антисовпадений и являться защитой от внешних сигналов. [2]
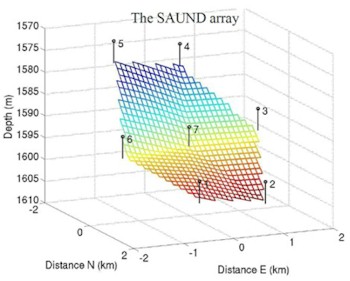
Рис.6. Детектор из семи гидрофонов первой стадии эксперимента
SAUND.
2. Study of Acoustic Ultrahigh-energy Neutrino Detection (SAUND).
[6]
Детектор расположен на морском дне, недалеко от Багамских островов на базе
военно-морской локации
AUTEC.
Проект реализовывался в две стадии. На первой (SAUND1) установка содержала 7 гидрофонов на глубине около 1100 м. Сбор данных
проводился в течении 195 дней. На второй стадии объем детектора был значительно
расширен, начало работы второй стадии – 2006 год.
По разнице времени прихода
сигнала на каждый гидрофон определяется его направление и расстояние до
источника.
3. Acoustic
COsmic
Ray
Neutrino
Experiment
(ACORNE) – проект группы ученых из Великобритании. Система сбора данных была
установлена на военном массиве гидрофонов Рона в Шотландии, предназначенном
для детектирования подводных лодок. [3] Массив расположен в акустически
тихом месте, и чувствительность гидрофонов вполне соответствует требованиям
для детектирования импульсов от заряженных частиц. Детектор стоит на глубине
около 200 м, шумы окружающей среды хорошо изучены. Средняя температура воды
приблизительно 10˚С в течение всего года. Наиболее подходящими для
регистрации каскадов являются гидрофоны, расположенные вокруг центра
массива. Они находятся в толще воды и содержат лучшие сенсоры, а также
меньше страдают от фона, обусловленного повторными отражениями, который
приходится учитывать для гидрофонов, установленных вблизи поверхности или
морского дна. Данные по аналоговым кабелям доставляются на береговой
компьютерный центр.
Сейчас система сбора данных работает в частотном диапазоне Королевского
военно-морского флота и не имеет требуемой производительности для регистрации
заряженных частиц и ливней. Поэтому необходимо приобрести и установить
специализированное оборудование для этого проекта. Планируется использовать 4
гидрофона независимо от основного массива в течение 1 месяца.
Выгодной отличительной чертой этого эксперимента от других является то, что
массив гидрофонов уже существует, развернут, а также то, что условия и шумы
окружающей среды хорошо известны, что позволяет более эффективно выделить
реальные сигналы.
Кроме того, было бы интересно и полезно сравнить данные, полученные в различных
морских условиях на массиве Роны и на американском гидроакустическом массиве
AUTEC.
4. ANTARES Modules for Acoustic Detection Under the Sea (AMADEUS)
в
Средиземном
море.
[7]
Расположенные на глубине более 2000 метров, акустические сенсоры AMADEUS
основаны на пьезо-керамических элементах для широкополосного детектирования
сигналов с частотами до 125 кГц.
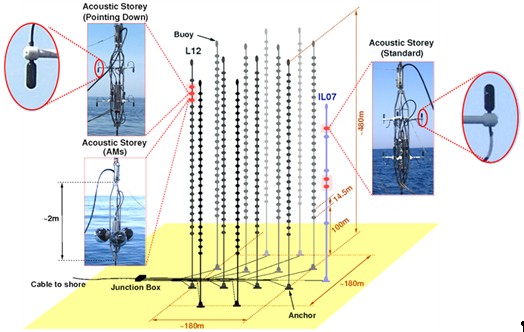
Рис.7. Схема детектора
ANTARES
и системы акустических модулей в нем. [8]
Строительство установки было завершено в
2008 году. Она состояла из шести "акустических модулей", и каждый включал в
себя шесть датчиков, установленных на расстоянии около 1 метра друг от
друга. Расстояние между модулями составляет от 15 до 340 метров.
Конструкция телескопа
ANTARESпредставляет собой вертикальные струны (линии), прикрепленные к морскому дну, на
которых держатся акустические и оптические модули детектора. Три акустических
модуля установлены на линии №7, и еще три – на инструментальной линии №12.
Акустические данные непрерывно собираются и обрабатываются на компьютере каждого
кластера, где применяются алгоритмы фильтров для выделения событий, которые с
высокой точностью могут соответствовать сигналам от нейтрино. Для оценки фона
были исследованы характеристики окружающего шума и переходные сигналы на глубине
около 2 километров.
Сами акустические модули имеют
три разных конфигурации, представленные на рисунке 7. Два типа отличаются
направлением датчиков (вверх или вниз), в которых пьезоэлектрические элементы
покрыты полиуретаном, а в третьем типе модулей по два сенсора установлены на
поверхности стандартной стеклянной сферы, внутри которой располагается
соответствующая электроника. Такие сферы используются для фотоэлектронных
умножителей черенковского детектора.
Сейчас детектор полностью
работает в составе 34 сенсоров. Должно было быть 36, но два вышли из строя еще
на этапе развертывания из-за разгерметизации.
[11]
Рис.8. Гидрофоны модели FFR-SX30, предложенные для системы
APS.
5. Acoustic Positioning System (APS)
– система,
включенная
в
проект
KM3NeT. Состоит из акустических синхронизированных трансиверов (устройств, в которые
включен и приемник, и передатчик сигнала), фиксированных якорями на морском
дне. Гидрофоны будут прикреплены к структурным элементам детектора рядом с
фотоэлектронными умножителями. [5] Предполагаемый диапазон энергий
начинается от 1018 эВ.
Тип и конструкция сенсоров для будущего акустического детектора сейчас
выбирается исходя из многих параметров: устойчивость к высокому давлению,
хорошая чувствительность, низкий уровень внутреннего шума и другие. Одним из
вариантов сейчас рассматривается серия
Free
Flooded
Ring (FFR)
модели FFR-SX30. Несмотря на то, что они пьезо-керамического типа, их свойства
вполне соответствуют условиям глубоководного детектора. Они работают в полосе
частот 20 – 40 кГц и были протестированы в чистой воде в лаборатории, в бассейне
и в морской воде. После этого трансиверы системы были интегрированы в
инструментальную линию акустического детектора в рамках проекта
ANTARES.
Рис.9. Якорь инструментальной линии детектора
ANTARES
с установленными на ней трансиверами.
[5]
Инструментальная линия была успешно развернута на окончательной позиции на
глубине 2475 м 7-го июля 2011 года.
Система акустического позиционирования, которая является базовой системой
электроники и программного обеспечения будущего детектора, называется
Sound Emission
Board (SEB). Для проверки этой системы в глубоководной среде и ее применимости к
регистрации нейтрино вообще и акустическому позичионированию в частности,
прототипы ее были интегрированы в двух различных местах: в инструментальной
линии телескопа
ANTARESи в акустическую систему эксперимента
NEMO
II.
[19]
Рис. 10. Схема работы телескопа
DUMAND.
6. Deep Underwater Muon And Neutrino Detection (DUMAND).
[9], [17]
Проект существовал с 1976 по 1995 год. Это был первый нейтринный глубоководный
телескоп, в Тихом океане на глубине 4800 метров недалеко от Гавайских островов.
Основная идея этого детектора состояла в том, что гидрофоны должны были
регистрировать акустические волны, возникающие при ударении адронного или
электромагнитного каскада о поверхность океана.
Рисунок 10 демонстрирует принцип работы телескопа: акустический и черенковский
детекторы работают синхронно. [9]
7. Geological Exploration Neutrino Induced Underwater Sound (GENIUS)
– проект
применения
пучков
нейтрино
в
геофизике.
Сформированный на сверхмощном ускорителе, такой пучок нацеливается в
заданном направлении и проходит значительно расстояние в Земле. По мере
распространения пучок генерирует акустическое излучение. Оценки показывают,
что пучок нейтрино, созданный протонным кольцевым ускорителем (геотроном) на
энергии 10 ТэВ на дистанции 1000 км и на глубине 10 км в Земле, должен иметь
диаметр около 20 м и генерировать акустические импульсы с амплитудой 10-5 Па в полосе частот около 90 Гц с центральной частотой 100 Гц.
Такие импульсы могут быть зарегистрированы решеткой акустических приемников
–геофонов на поверхности Земли или гидрофонов в воде. Фиксируя изменения
акустического сигнала вдоль трассы пучка, можно получить информацию о типе пород
и полезных ископаемых на довольно больших глубинах в Земле.
[1]
Рис.11. Красным отмечены дырки, в которые спущены акустические модули (схема по
состоянию на январь
2009 года).
8. South Pole Acoustic Test Setup (SPATS).
[15]
Тестовый акустический детектор в составе эксперимента
IceCube,
главной целью которого является детектирование нейтрино с энергией в районе
ГЗК-области спектра и изучение акустических свойств полярного льда.
Разработка проекта была начата в 2005 году, а спустя 18 месяцев, в январе
2007 года были успешно установлены и развернуты три струны детектора (A,
B,
C).
Тип чувствительных датчиков – пьезокерамика.
Сейчас измеряется скорость звука, фон, чувствительность и другие технические
характеристики детектирующих устройств. В летний сезон 2007-2008 года была
установлена четвертая струна (D)
эксперимента.
На каждой струне крепятся по 7
акустических модулей. Внешний вид модуля и расположение на нем гидрофонов
показаны на рисунке 15. В верхней и нижней сферических частях стоят по три
сенсора по трем различным направлениям. В цилиндрической части посередине также
установлен пьезоэлектрический сенсор, защищенный корпусом из полиуретана.
Сенсоры оптимизированы для температурного диапазона от -70˚С до +10˚С и давлений
в от 0 до 60 бар. Частотный диапазон составляет 10 – 80 кГц.
Первый сенсорный модуль
Второй сенсорный модуль
Сенсор HADES
Рис. 12. Внешний вид акустического модуля и трех блоков сенсоров. [14]
Каждая струна присоединена к акустическому распределительному узлу
Acoustic
Junction
Box(AJB),
расположенному на поверхности льда, при помощи двух защищенных кабелей.
[14]
Планируется согласовать данные от акустической системы с теми, что будут
получаться от оптического черенковского телескопа
IceCube, а
также разрабатываемого нейтринного телескопа черенковских сигналов в радио
диапазоне.
9. Sea Acoustic Detector of Cosmic Objects (SADCO)
[10].
Проект
нейтринного телескопа в рамках эксперимента
NESTOR в Ионическом море. Объем детектора предполагался более 108 м3
на
глубине 3.5 – 4 км. Диапазон регистрируемых энергий – выше 1017 эВ. Тестовая конструкция была протестирована около Камчатки. Массив состоял
из 2400 гидрофонов, установленных на морском шельфе и соединенных кабелем с
электронным оборудованием на берегу. Угол обзора составлял 120˚.
Регистрировались частицы с энергией больше 1020 эВ в очень большом объеме воды. Главной задачей было составить алгоритмы
выделения нейтринных событий, и для калибровки системы со специального
корабля посылались акустические сигналы, симулирующие импульсы от нейтрино с
разными пространственно-временными параметрами.
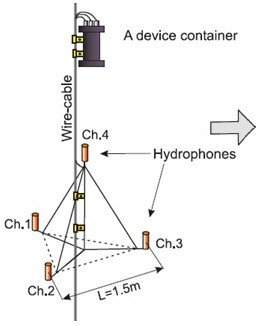
Рис.13. Тетраэдрическая антенна из четырех гидрофонов в озере Байкал.
10. Прототип акустического детектора в рамках нейтринного эксперимента на озере
Байкал. [13] В апреле 2004 года четырехканальная акустическая антенна была запущена
на глубине около 100 метров на структурной линии телескопа
NT200+.
Этот детектор рассматривается как прототип будущего подводного акустического
телескопа. Система обработки включала в себя следующие операции:
передача односекундных образцов данных на береговой компьютерный центр после
сигнала триггер
NT200+;
в реальном времени поиск коротких акустических импульсов, которые могли
интерпретироваться как сигналы от далеких квази-локальных источников;
автоматическая обработка фоновой статистики.
Соединение с работой телескопа
NT200+
может дать возможность идентифицировать свойства акустических сигналов и
провести калибровку по энергии, если накопится достаточно большое количество
совпадений.
Хотя температура воды в Байкале близка к температуре максимальной плотности,
очень низкое поглощение звука в чистой воде может позволить снизить
энергетический порог регистрации до 1018– 1019эВ.
В рамках эксперимента были получены примеры биполярных импульсов и распределие
сигналов в зависимости от зенитного угла. До этого несколько гидрофонов работало
на малой глубине от 3 до 18 метров подо льдом в зимнее время.
11. Ocean Noise Detection Experiment (NEMO- OνDE).
[4],
[16] Детектирующая система в рамках проекта
NEMO,
работала с января 2005 по ноябрь 2006 года. Состояла из 4 синхронизированных
гидрофонов на глубине 2000 м в 25 км от берега, детектировавших акустические
волны в диапазоне 10 Гц – 40 кГц. По оптическим кабелям данные поступали на
береговой центр, где анализировались в реальном времени. Сейчас проводятся
исследования фона, биоакустических сигналов (песни китов, дельфинов и пр.) и
проверка алгоритмов реконструкции событий.
Рис.14. Один "этаж" башни
NEMO.
12.
NEMO Phase II – Acoustic Positioning and Acoustic Physics.
[4] Детектор представляет собой вертикальную башню из 64 оптических элементов на 16
этажах общей высотой 750 м, помимо них содержал еще 34 гидрофона для системы
акустического позиционирования.
5. Некоторые результаты
Brookhaven
NL
(Harvard,
SLAC)
1978 – 1979. [4] Наблюдались биполярные импульсы, а также зависимость амплитуды сигнала от
выделенной энергии.
Рис.15. Примеры биполярных импульсов.
Рис.16. Зависимость амплитуды сигнала от выделенной ливнем энергии.
Главным результатом было подтверждение термоакустического метода генерации
звука.
ACORNE.
[3] Был получен довольно большой набор данных, который затем проанализировали для
выделения нейтринных сигналов. Также исследовали чувствительность гидрофонов,
изучили свойства распространения адронного ливня в воде, производящего в том
числе акустические сигналы. Были разработаны новые методы моделирования
акустического сигнала, индуцированного термоакустическим механизмом
взаимодействия.
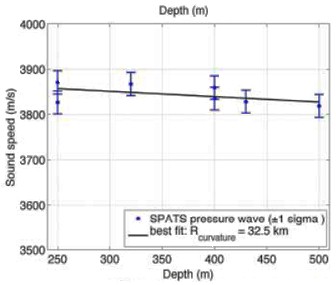
SPATS.
[4], [12], [15] Были измерены акустические параметры льда на разной глубине.
Рис.17. Зависимость скорости звука от глубины. [4]
Рис.18. Распределение шума.
[12]
Шум стабильный, распределен по Гауссу, не зависит от погодных условий. Сезонных
изменений не выявлено.
Также регистрировались акустические волны, возникавшие во льду во время бурения
остальных "дырок", когда первые три струны уже были спущены и включены.
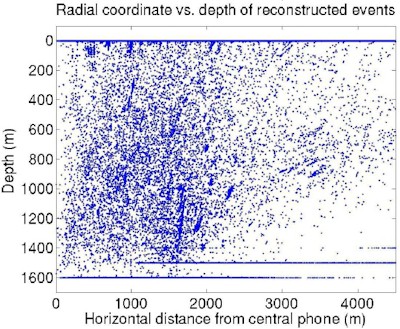
SAUND. [6] Первая стадия работы, 195 дней работы, 2003-2004 год. Зарегистрировано около 25
миллионов событий.
Тестировались алгоритмы отделения фоновых сигналов от реальных событий, а также
выделение отраженных от дна акустических волн и анализа волнового фронта.
Рис.19. Распределение восстановленных событий с разрешением 10 м.
Байкал. [13] Наблюдались акустические импульсы различной амплитуды и формы, в том числе
биполярной. Были изучены свойства фона и разработан алгоритм выделения
нейтринных сигналов по форме и направлению распространения – акустическая волна
должна образовывать диск с осью, совпадающей с направлением каскада.
Ниже приведены примеры зарегистрированных биполярных импульсов (рис.20) в период
за апрель – май 2006 года, и зависимость их наблюдаемого количества от зенитного
угла (рис.21).
Рис.20. Запись биполярных импульсов на 4-х каналах тетраэдрической антенны.
Рис.21. Угловое распределение импульсов.
Большинство импульсов сосредоточены в области, близкой к горизонтальной
плоскости. Источником импульсов, идущих из направлений ниже горизонта, скорее
всего, является отражение идущих сверху, но близко к горизонтальному
направлению, от более плотных слоев воды на глубине, где возрастает скорость
распространения звука.
AMADEUS.
[7] С декабря 2007 года по январь 2010 года проводилось измерение окружающего шума в
воде. Была накоплена большая статистика, учитывающая в том числе негауссово
распределение и потенциально возможные сигналы от заряженных частиц.
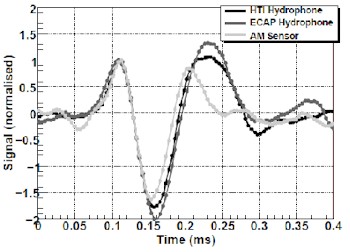
Рис.22. Пример биполярного импульса, зарегистрированного на трех типах
акустических модулей детектора
AMADEUS. [11]
Диапазон частот шума окружающей среды 1- 50 кГц.
Также был предложен метод оптимизации сигнала, то есть выделение характерного
импульса от каскада заряженных частиц из общего фона выбором определенного
диапазона частот. Предварительные исследования с использованием параметризации
ливня и некоторых алгоритмов, показывают, что нужный диапазон составляет
примерно от 10 до 50 кГц. Например, отношение сигнала к шуму в диапазоне 1-50
кГц составляет 25мПа, в то время как для диапазона 10 - 50 кГц уже 7.5мПа.
Рис.23. Значения относительного шума в зависимости от времени дня. Видны два
максимума в районе 2 часов утра и 21 часа, связанные, скорее всего, с
судоходством.
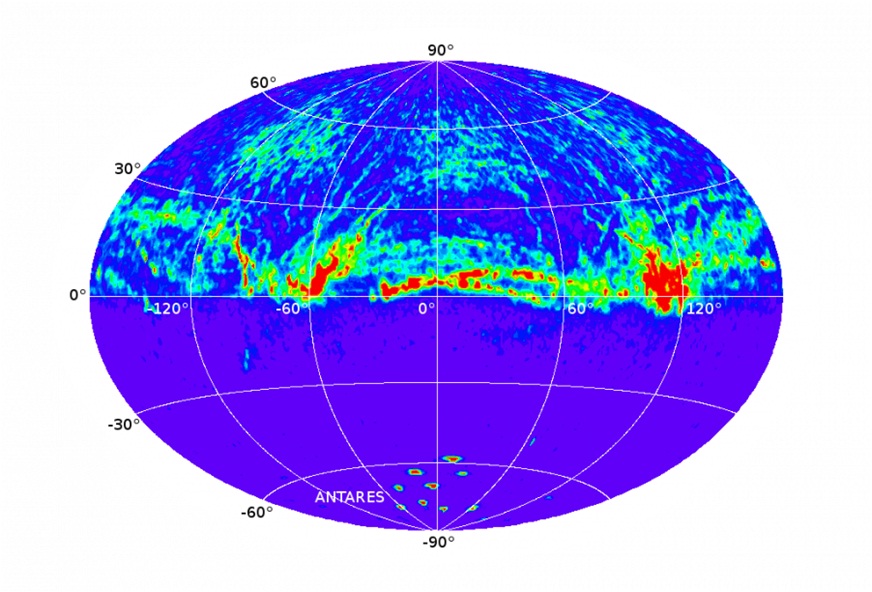
Было получено распределение акустических сигналов от зенитного и азимутального
угла. Красные пятна указывают направление, откуда наиболее интенсивно шли
звуковые волны. По предварительным оценкам, эти направления совпадают с
направлениями на большие порты Средиземного моря, но точное выделение затруднено
из-за сигналов, переотраженных от береговых линий.
Рис.24. Распределение направлений акустических сигналов по азимутальному и
зенитному углу, по результатам одного месяца сбора данных.
В дальнейшем планируется улучшить систему позиционирования и алгоритмы выделения
нейтринных сигналов. Также разрабатывается возможность гибридного детектора, в
котором в позиционировании участвуют и акустический, и оптический метод.
NEMO-
OνDE.
[4] Был измерен средний акустический шум в период с января 2005 по ноябрь 2006 года.
Рис.25.
Зависимость среднего шума в воде от
частоты.
6. Перспективы и проблемы
Одна из основных проблем для развития акустического метода регистрации нейтрино
– это отсутствие экспериментально проверенной теоретической модели для расчета.
Сейчас мы лишь качественно представляем себе процессы выделения тепла в
результате ионизации каскадом, и как параметры распределения источников тепла в
среде связаны с параметрами первоначального нейтрино. Как именно информация о
первоначальном нейтрино переходит в параметры акустического сигнала. Поэтому в
каждом конкретном случае алгоритмы извлечения информации о нейтрино
модифицируются и не описываются подтвержденной теорией.
Другая проблема связана с малой статистикой, так как собирать данные начали
совсем недавно. Планируемые в будущем проекты акустических нейтринных
телескопов, а также гибридных детекторов, могут решить эту проблему.
Если получится совместить карту направлений прихода нейтрино, полученную
оптическими черенковскими телескопами с тем распределением, которое дает
акустический метод, то это поможет с большей вероятностью определить источники
нейтрино во Вселенной, а также даст ценную информацию для калибровки
акустических детекторов и построения соответствующей теории.
Г.А. Аскарьян, Б.А. Долгошеин. Акустическая регистрация нейтрино высоких
энергий на больших глубинах // Академия наук СССР. Физический институт им.
П.Н.Лебедева. Препринт №160. Москва 1976.
[M. Ardid и
др.
Acoustic Transmitters for Underwater Neutrino Telescopes //
Research Institute for Integrated Management of Coastal Areas - IGIC,
Universitat Politècnica de València, Paranimf 1, E-46730 Gandia, València, Spain.
http://arxiv.org/pdf/1204.0809.pdf
Justin Vandenbroucke.
Acoustic UHE Neutrino Detection in Water: Lessons from SAUND // AMANDA/IceCube
Collaboration Meeting Bartol Research Institute, University of Delaware March
24, 2004. http://saund.stanford.edu/saund1/talks/bartol_vandenbroucke.pdf
R. Lahmann, on behalf of the ANTARES Collaboration. Status and Recent
Results of the Acoustic Neutrino Detection Test System AMADEUS // http://arxiv.org/pdf/1104.3041v1.pdf
[11] -
J.A. Aguilar, I. Al Samarai, A. Albert и
др.
AMADEUS – The Acoustic Neutrino Detection Test System of the ANTARES Deep-Sea
Neutrino Telescope. //
2 May 2011. http://arxiv.org/pdf/1009.4179v2.pdf
R. Abbasi, Y. Abdou, T. Abu-Zayyad и
др.
Background studies for acoustic neutrino detection at the South Pole. // 18 Oct
2011. http://arxiv.org/pdf/1103.1216v2.pdf
K. Antipin, V. Aynutdinov, V. Balkanov и
др.
A prototype device for acoustic neutrino detection in Lake Baikal.
// July 2007. http://arxiv.org/pdf/0710.3113v2.pdf
Y. Abdou, K-H. Becker, J. Berdermann. Design and performance of the South Pole
Acoustic Test Setup // 22 May 2011. http://arxiv.org/pdf/1105.4339v1.pdf
C.D. Llorens, M. Ardid, T. Sogorb. The Sound Emission Board of the KM3NeT
Acoustic Positioning System //
Universitat Politècnica de València representing the KM3NeT Consortium, C/
Paranimf 1, E-46730 Gandia, Spain. http://arxiv.org/pdf/1201.1184v1.pdf